
비디오 자습서
다음 단계에 따라 자신의 ROBOHERO을 만들 수 있습니다.
ROBOHERO를 스스로 만들 수 있는 조립 설명서
-
구리 부싱 조립
부품 목록:
- copper lining x 14Pcs
- plastic part A x 1Pcs(L)
- plastic part B x 1Pcs(R)
- plastic part C x 2Pcs
- plastic part D x 2Pcs
- plastic part E x 2Pcs
- plastic part F x 2Pcs(L)
- plastic part G x 2Pcs(R)
조립 방법:그림에 따라 14 개의 구리 부싱을 플라스틱 부품에 누릅니다.
 [Note] 구리 부싱이 외관에 튀어 나오지 않도록 눌렀는지 확인하십시오.
[Note] 구리 부싱이 외관에 튀어 나오지 않도록 눌렀는지 확인하십시오.

-
전면 램프커버 조립
부품 목록:
- plastic part H x 1Pcs
- plastic part I x 1Pcs
- lampshade paster x 1Pcs
조립 방법:그림에 따라 플라스틱 부분 I을 플라스틱 부분 H에 누르고 램프커버 붙여 넣기를 플라스틱 부분 I에 붙입니다.
 [Note] 플라스틱 부분이 눌려 있는지 확인하십시오. 이탈을 방지하기 위해 접합부에 접착제를 약간 추가 할 수 있습니다.
[Note] 플라스틱 부분이 눌려 있는지 확인하십시오. 이탈을 방지하기 위해 접합부에 접착제를 약간 추가 할 수 있습니다. -
후드 조립
부품 목록:
- plastic part J x 1Pcs
- plastic part K x 1Pcs
- plastic part L x 1Pcs
- paster x 1Pcs
- HMJ2-6B x 2Pcs
- HMJ2-8B x 2Pcs
조립 방법:
- 그림에 따라 HMJ2-8B를 사용하여 플라스틱 부품 K를 플라스틱 부품 J에 잠급니다.

- 그런 다음 HMJ2-6B를 사용하여 그림에 따라 플라스틱 부분 L을 플라스틱 부분 K에 잠급니다.

- 플라스틱 부분 L에 스틱 붙여 넣기

-
서보 조립 – 환경 설정
부품 목록:
- Battery x 1Pcs
- Main control panel x 1Pcs
- Power board x 1Pcs
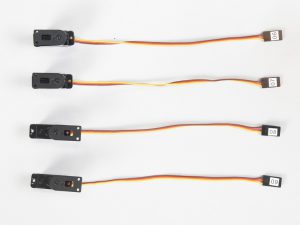
- Power connecting wire x 1Pcs
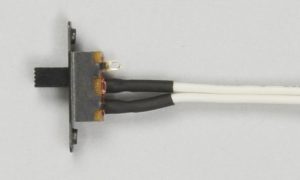
- Switching wire x 1Pcs
조립 방법:
- 배터리와 스위칭 와이어를 전원 보드에 각각 연결하고 전원 연결 와이어를 사용하여 메인 제어판과 전원 보드를 연결합니다.

- 서보에 필요한 설정을 번호에 따라 메인 제어판의 해당 위치에 삽입하십시오.
- 전원을 켠 후 전용 APP를 다운로드하고 WIFI를 연결 한 후 APP를 시작하여 빠른 시작 가이드에 따라 서보 설정 기능을 작동합니다.
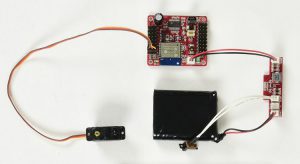
- ZERO를 클릭하면 서보가 자동으로 중립 점에 고정됩니다. 이때 액슬 슬리브 조립 및 서보베이스 연결을 시작할 수 있습니다.
[Note]
- 메인 제어반과 충전 반을 전원을 켤 때 합선이나 가연성이있는 곳에 놓을 경우 스위치의 위치에주의하십시오.
- 서보와 메인 제어반의 전선을 연결할 때 방향에주의하십시오. (검은 색 선 / 음극 단자는 모두 메인 제어반 외부를 향합니다.)
-
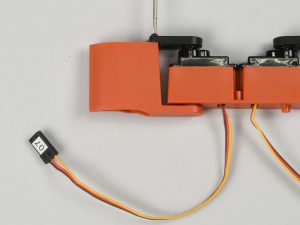
서보 조립 – 액슬 슬리브 및 연결베이스
부품 목록:
- servo x 1Pcs
- axle sleeve x 1Pcs
- HMF2-5B-1 x 1Pcs
- plastic part C1 x 1Pcs
조립 방법:
- 환경 설정 단계를 따르고, APP 서보 설정 기능을 사용하고, ZERO를 클릭하고, 서보 필요한 설정을 잠급니다.
- 액슬 슬리브를 서보 기어로 누릅니다.

- 서보의 연결베이스 각도 설정을 따르고 정확한 각도로 플라스틱 부품 CI를 액슬 슬리브에 누르고 HMF-5B-1을 사용하여 고정합니다.

[Note]
- 서보마다 연결 기준 각도 설정이 다릅니다. 함께 섞지 마십시오
- 연결베이스를 필요한 각도 (90 ° 또는 180 °)로 조정할 수없는 경우 액슬 슬리브를 꺼내 회전시켜 기어를 배치하기 전에 위치를 변경 한 다음 연결베이스 각도를 다시 조정할 수 있습니다.

-
서보 조립 – 설정
부품 목록:
- servo x 17Pcs
- axle sleeve x 17Pcs
- HMF2-5B-1 x 17Pcs
- plastic part C1 x 8Pcs
- plastic part D1 x 2Pcs
- plastic part M x 2Pcs
- plastic part E1 x 2Pcs
- plastic part N x 1Pcs
조립 방법:
- 액슬 슬리브와 연결베이스 단계를 따라 각각 17 개의 서보 설정 및 조립을 완료합니다.
- 서보 No.6, # 7, # 8, # 9의 연결 기준 각도 (180 °) 설정은 다음과 같습니다.
- 서보 No. # 11, # 15의 연결 기준 각도 (90 °) 설정은 다음과 같습니다.

- 서보 No. # 0, # 4의 연결 기준 각도 (90 °) 설정은 다음과 같습니다.

- 서보 No. # 1, # 14의 연결 기준 각도 (90 °) 설정은 다음과 같습니다.

- 서보 No. # 5, # 10의 연결 기준 각도 (90 °) 설정은 다음과 같습니다.

- 서보 No. # 2, # 3, # 12, # 13의 연결 기준 각도 (90 °) 설정은 다음과 같습니다

- 서보 No. # 16의 연결 기준 각도 (180 °) 설정은 다음과 같습니다.

[Note]
- 서보마다 연결 기준 각도 설정이 다릅니다. 함께 섞지 마십시오.
- 조립시 반드시 그림을 따르십시오. 부품의 서보 번호와 방향에 주의하십시오.
- 서보의 와이어는 두 가지 유형의 길이 (15CM 및 22CM), No. # 0, # 1, # 2, # 13, # 14, # 15의 길이는 22CM, 다른 11 개의 길이는 15CM입니다.
-
핸드 조립
부품 목록:
- servo set x 4Pcs(#6,#7,#8,#9)
- plastic part A set x 1Pcs(L)
- plastic part B set x 1Pcs(R)
- plastic part O x 2Pcs
- HMJ2-8B x 12Pcs
- binding x 2Pcs
조립 방법:
- 그림에 따라 플라스틱 부분 O에 서보 세트 (# 6, # 7)를 설치하고 HMJ2-8B를 사용하여 잠급니다.

- 그림에 따라 플라스틱 부품 A 세트 (L)를 서보 세트 # 7 포트에 설치하고 HMJ2-8B를 사용하여 잠급니다.

- 그림에 따라 바인딩을 설정하여 왼손 조립을 완료하십시오.
- 오른손 어셈블리는 동일한 절차를 기반으로합니다 (서보 세트 # 8 포트에 플라스틱 부품 B 세트 설치).

[Note] 조립시 반드시 그림을 따르십시오. 서보 번호와 부품 방향에주의하십시오. -
다리 조립 – 조인트 연결베이스 – 상부
부품 목록:
- plastic part P x 2Pcs
- plastic part E set x 2Pcs
- HMJ2-8B x 4Pcs
조립 방법:
- 그림에 따라 플라스틱 부분 P를 플라스틱 부분 E 세트와 연결하고 HMJ2-8B를 사용하여 고정합니다.
- 동일한 절차에 따라베이스-상부 어셈블리를 연결하는 다른 조인트 세트를 완료하십시오.
[Note] 조립시 반드시 그림을 따르십시오. -
다리 조립 – 조인트 연결베이스 – 하부
부품 목록:
- plastic part Q1 x 1Pcs(L)
- plastic part Q2 x 1Pcs(R)
- plastic part D set x 2Pcs
- HMJ2-8B x 4Pcs
조립 방법:
- 그림에 따라 플라스틱 부품 Q1을 플라스틱 부품 D 세트와 연결하고 HMJ2-8B를 사용하여 고정하여베이스-하부 (L)를 연결하는 조인트를 완료합니다.

- 동일한 절차에 따라베이스 하부 (R) 어셈블리를 연결하는 또 다른 조인트 세트를 완료합니다.
[Note] 조립시 반드시 그림을 따르십시오. 부품의 방향에주의하십시오. -
다리 조립
부품 목록:
- servo set x 8Pcs(#0,#1,#2,#3,#12,#13,#14,#15)
- joint connecting base -upper x 2Pcs
- joint connecting base -lower x 2Pcs(L,R)
- plastic part F set x 2Pcs
- plastic part G set x 2Pcs
- plastic part R1 x 1Pcs(L)
- plastic part R2 x 1Pcs(R)
- HMJ2-8B x 16Pcs
- HMJ2-6B x 12Pcs
조립 방법:
- 그림에 따라 플라스틱 부품 R1에 서보 세트 (# 0)를 설치하고 HMJ2-6B를 사용하여 잠급니다.
- 그림에 따라 플라스틱 부품 F 세트를 설치하고 HMJ2-6B를 사용하여 잠급니다.

- 그림에 따라 서보 세트 (# 1)를 설치하고 HMJ2-8B를 사용하여 고정합니다.
- 그림에 따라 조인트 연결베이스 – 하부 (L)를 설치하고 HMJ2-8B를 사용하여 고정합니다.
- 그림에 따라 서보 세트 (# 2, # 3)를 설치하고 HMJ2-6B를 사용하여 고정합니다.

- 그림에 따라 HMJ2-8B를 사용하여 플라스틱 부품 G 세트를 설치합니다.

- 그림에 따라 조인트 연결베이스 상부를 설치하고 HMJ2-8B를 사용하여 고정하여 왼쪽 다리 조립을 완료합니다.

- 동일한 절차에 따라 오른쪽 다리 조립을 완료합니다.
[Note] 조립시 반드시 그림을 따르십시오. 서보 번호와 부품 방향에주의하십시오.

-
다리 조립 – 와이어 조정
부품 목록:
- left leg set x 1Pcs
- right leg set x 1Pcs
- fixing sleeve x 2Pcs
조립 방법:
- 그림에 따라 왼쪽 다리의 모든 서보를 최대 각도로 조정하고 와이어를 수평으로 맞추고 고정 슬리브를 설치하기 전에 충분한 이동 공간을 확보하십시오.
- 동일한 절차에 따라 전체 오른쪽 다리 조립을 완료합니다.

[Note] 이동할 때 서보가 와이어에 의해 방해받지 않도록 충분한 와이어 길이를 예약하십시오. -
몸체 조립 – 팔 다리 서보
부품 목록:
- servo set x 4Pcs(#4,#5,#10,#11)
- plastic part S x 1Pcs
- HMJ2-8B x 8Pcs
조립 방법:그림에 따라 플라스틱 부품 S에 서보 세트를 설치하고 HMJ2-8B를 사용하여 잠급니다.
 [Note] 조립시 반드시 그림을 따르십시오. 서보 번호와 부품 방향에주의하십시오.
[Note] 조립시 반드시 그림을 따르십시오. 서보 번호와 부품 방향에주의하십시오. -
몸체 조립 – 후면
부품 목록:
- plastic part T x 1Pcs
- HMJ2-8B x 4Pcs
조립 방법:그림에 따라 플라스틱 부분 T에 서보 와이어를 설치하고 HMJ2-8B를 사용하여 잠급니다.

[Note]
- 조립시 반드시 그림을 따르십시오. 부품의 서보 번호와 방향에 주의하십시오.
- 그림에 따라 서보 와이어를 정렬하십시오.
-
몸체 조립 – 헤드 서보
부품 목록:
- servo set x 1Pcs(#16)
- HMJ2-6B x 4Pcs
조립 방법:
- 그림에 따라 서보 세트를 설치하고 HMJ2-6B를 사용하여 고정합니다.

- 그림에 따라 서보 와이어를 넣습니다.
[Note] 조립시 반드시 그림을 따르십시오. 부품의 방향에주의하십시오. -
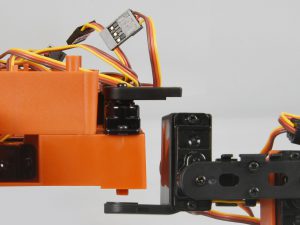
몸체 조립 – 조인트 연결베이스
부품 목록:
- plastic part C set x 2Pcs
- HMJ2-8B x 4Pcs
조립 방법:그림에 따라 플라스틱 부품 C 세트를 설치하고 HMJ2-8B를 사용하여 잠급니다.
 [Note] 조립시 반드시 그림을 따르십시오. 부품의 방향에주의하십시오.
[Note] 조립시 반드시 그림을 따르십시오. 부품의 방향에주의하십시오. -
팔 다리 조립
부품 목록:
- body set x 1Pcs
- left hand set x 1Pcs
- right hand set x 1Pcs
- left leg set x 1Pcs
- right leg set x 1Pcs
- HMJ2-6B x 4Pcs
- HMJ2-8B x 4Pcs
조립 방법:
- 그림에 따라 왼손 / 오른손 세트를 설치하고 HMJ2-8B를 사용하여 고정합니다.

- 그림에 따라 좌 / 우 다리 세트를 설치하고 HMJ2-6B를 사용하여 고정합니다.
[Note] 조립시 반드시 그림을 따르십시오. 부품의 방향에주의하십시오.
-
전원 보드 조립
부품 목록:
- power board x 1Pcs
- power connecting wire x 1Pcs
- switching wire x 1Pcs
- charging socket cord x 1Pcs
- LED wire x 1Pcs
조립 방법:
- 그림에 따라 전원 연결선, 스위칭 선, 충전 소켓 코드 중 한 단자를 전원 보드에 연결하고 다른 단자는 기기의 상단 구멍을 통해 뒤쪽으로 연결합니다.
- 그림에 따라 LED 와이어의 소켓 단자를 기계의 하단 구멍을 통해 뒤쪽으로 넣고 전원 보드를 홈에 넣습니다.
[Note] 후속 조립의 편의를 위해 그림에 따라 전선을 배열하십시오.
-
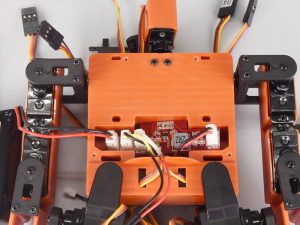
메인 제어 판넬 조립
부품 목록:
- main control panel x 1Pcs
- HMJ2-6B x 4Pcs
조립 방법:그림에 따라 전원 연결선, 스위칭 선, 충전 소켓 코드, LED 선 및 좌 / 우 서보 선 (# 6, # 7, # 8, # 9)을 고정 위치에 놓고 메인 컨트롤을 설치합니다. 패널을 열고 HMJ2-6B를 사용하여 잠급니다.
 [Note] 메인 제어판을 설치하기 전에 후속 조립의 편의를 위해 그림에 따라 전선을 뽑으십시오.
[Note] 메인 제어판을 설치하기 전에 후속 조립의 편의를 위해 그림에 따라 전선을 뽑으십시오. -
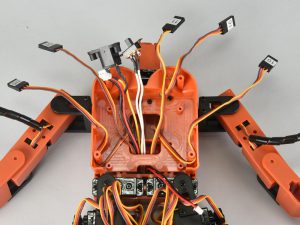
메인 제어판 연결
조립 방법:그림에 따라 전원 연결 와이어, 스위칭 와이어, 충전 소켓 코드, LED 와이어 및 17 세트의 서보 와이어를 주 제어판의 해당 위치에 삽입합니다.

[Note]
- 메인 컨트롤 패널과 서보 와이어를 연결할 때 방향에주의하십시오. (검은 색 와이어 / 음극 단자는 모두 메인 컨트롤 패널 외부를 향합니다.)
- 서보가 번호에 따라 메인 제어판의 해당 위치에 삽입되었는지 확인하십시오.
-
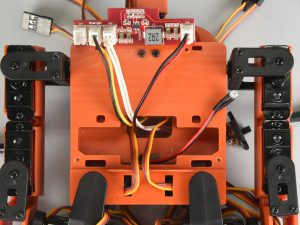
배선 정리
부품 목록:
- Binding belt x 2Pcs
조립 방법:메인 제어반의 배선을 그림에 따라 배열하고 좌우 레그 서보 배선 (# 0, # 1, # 2, # 3, # 12, # 13, # 14, # 15)을 위한 충분한 공간을 확보 한 후 고정 된 위치에 고정하려면 바인딩 벨트를 사용하십시오.
 [Note] 이동할 때 서보가 와이어에 간섭을받을 경우 충분한 와이어 길이를 예약하십시오.
[Note] 이동할 때 서보가 와이어에 간섭을받을 경우 충분한 와이어 길이를 예약하십시오. -
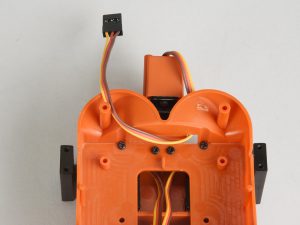
후면 조립
부품 목록:
- plastic part U x 1Pcs
- HMF2-5B-1 x 2Pcs
- HMJ2-6B x 2Pcs
- HMJ2-8B x 4Pcs
조립 방법:
- 그림에 따라 충전 소켓 코드를 플라스틱 부분 U의 충전 구멍에 설치하고 HMJ2-6B를 사용하여 잠급니다.
- 그림에 따라 플라스틱 부분 U의 해당 위치에 스위칭 와이어를 설치하고 HMF2-5B-1을 사용하여 잠급니다.

- 그림에 따라 플라스틱 부품 U 세트를 설치하고 HMJ2-8B를 사용하여 잠급니다.

[Note]
- 조립시 스위칭 와이어의 방향에주의하십시오.
- 플라스틱 부품 U를 조립할 때 MINI USB의 구멍이 올바른지 확인하고 와이어가 부적절하게 구부러지지 않도록하십시오.
-
앞 가슴 조립
부품 목록:
- battery x 1Pcs
- plastic part H set x 1Pcs
- HMJ2-8B x 4Pcs
조립 방법:
- 그림에 따라 배터리를 전원 보드에 연결하십시오.

- 그림에 따라 플라스틱 부분 H 세트에 LED 와이어를 설치하십시오.

- 그림에 따라 HMJ2-8B를 사용하여 플라스틱 부품 H 세트를 설치합니다.
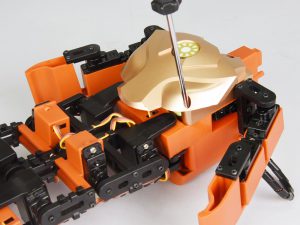
[Note] 배터리를 장착하기 전에 스위치가 꺼져 있는지 확인하십시오. -
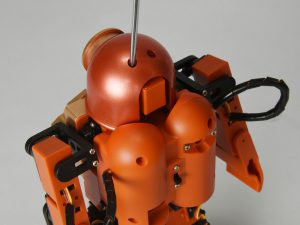
머리 조립
부품 목록:
- hood set x 1Pcs
- HMJ2-6B x 2Pcs
조립 방법:그림에 따라 후드 세트를 설치하고 HMJ2-6B를 사용하여 잠급니다.
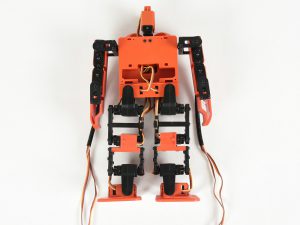
-
ROBOHERO 조립이 완료!
